Agli inizi di marzo l’Università Cattolica del Sacro Cuore di Piacenza si è dotata di un laboratorio per sviluppare, con l’Istituto Italiano di Tecnologia, un robot per la potatura. Sarà una macchina con quattro zampe per muoversi su terreni accidentati e un braccio con cesoia, in grado di riconoscere le parti delle piante da recidere.
L’inaugurazione è del 5 marzo scorso, ma suggella un lungo lavoro di collaborazione tra gruppi di ricercatori dell’Università Cattolica di Piacenza e dell’Istituto Italiano di Tecnologia nel campo delle scienze agrarie e della robotica applicata. Parliamo della nascita di un particolarissimo laboratorio di ricerca in cui vedrà la luce un robot per la potatura dei vigneti che, in realtà, sarà l’unione tra due robot di diverso tipo.

Claudio Semini responsabile della linea di ricerca Dynamic Legged Systems dell’IIT che ha creato il robot HyQReal
Due robot è meglio di uno
Il primo è una macchina quadrupede, sviluppata dall’IIT nei suoi laboratori di Genova, simile per certi aspetti al famoso Spot dell’americana Boston Dynamics, che tanto spazio ha trovato nei nostri quotidiani lo scorso dicembre, in occasione del lancio di un fantastico video di robot danzanti. Si chiama HyQReal ed è il frutto di un lungo lavoro condotto dalla linea di ricerca Dynamic Legged Systems dell’IIT in collaborazione con Inail e Moog. Il secondo robot è un braccio collaborativo, montato sul quadrupede e dotato di cesoie per realizzare la potatura delle viti.
Capace di imparare
Claudio Semini, responsabile dell’unità di ricerca dell’IIT sui robot dotati di gambe spiega come funzionerà. «Attraverso il ricorso all’intelligenza artificiale, è stata addestrata una rete neurale artificiale (Artificial Neural Network) con l’obiettivo di distinguere i diversi organi della vite e di identificare i punti di taglio in corrispondenza dei quali un braccio robotico collegato a una forbice elettrica (end-effector) eseguirà la potatura».
Il sistema, dice ancora Semini, «vedrà i primi test al termine della prossima stagione vegetativa e sarà poi perfezionato nel corso del 2022».
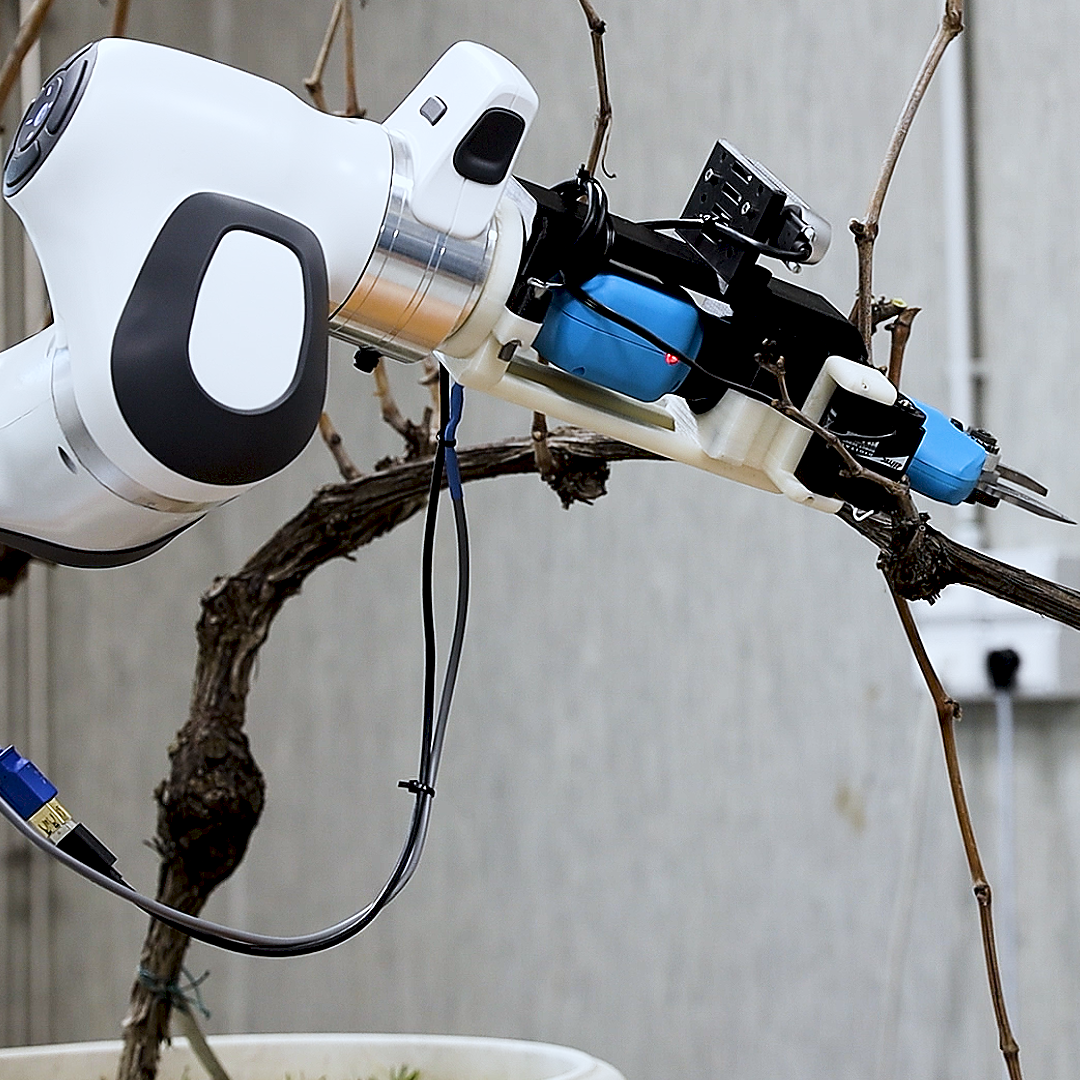
Il braccio robotico collaborativo, dotato di cesoia elettrica, che sarà montato sul robot quadrupede ed effettuerà materialmente le operazioni di potatura
Mobile e preciso
Il robot quadrupede HyQReal è stato presentato per la prima volta nel 2019 quando ha mostrato la sua forza trainando un aereo di 3,5 tonnellate all’aeroporto di Genova. È una macchina dotata di una grande stabilità, assicurata dai quattro solidi punti di appoggio, che può muoversi con facilità anche in ambienti difficili, con forti pendenze o fondo irregolare. È quindi molto più versatile rispetto a un robot dotato di ruote e ha la possibilità di dosare e misurare i movimenti con precisione tale da potersi avvicinare alle piante di vite trovando sempre il punto di approccio migliore. Il braccio snodato, attrezzato con le cesoie, fa poi il resto, trovando il punto ideale per effettuare il taglio senza danneggiare la pianta.
Un accordo ricco di promesse
Il nuovo laboratorio è frutto di un accordo tra l’Università Cattolica del Sacro Cuore di Piacenza e dell’IIT e ha sede nell’ateneo piacentino. L’obiettivo di questa unione di intenti, spiega Pier Sandro Cocconcelli, responsabile del programma di ricerca, «è sviluppare approcci innovativi nell’ambito delle scienze agrarie, alimentari e ambientali, per mettere a punto metodi diagnostici molecolari rapidi, nuovi materiali derivati da sottoprodotti dell’industria agro-alimentare e sistemi robotici per il monitoraggio e la gestione dei sistemi colturali, di cui il laboratorio di robotica è uno dei risultati».
Trasformare la conoscenza in algoritmi
Il gruppo di lavoro interdisciplinare lavora per la diffusione della digitalizzazione e dell’automazione in agricoltura. Con la finalità, illustrata da Matteo Gatti, docente di viticoltura e referente del laboratorio per l’Università Cattolica, «di favorire la crescita sostenibile delle produzioni agricole, aiutando ad affrontare il problema della carenza di manodopera. Tre in particolare le aree applicative che intendiamo perfezionare: la navigazione autonoma del robot, la sua capacità di utilizzare sensori per “leggere” l’ambiente che lo circonda e la manipolazione delle colture». Per realizzare macchine agricole smart occorre una profonda conoscenza della morfologia e della fisiologia di piante e animali e delle migliori pratiche per ottimizzare la produzione. E uno degli aspetti più affascinanti della collaborazione tra Cattolica e IIT, conclude Gatti, «consiste proprio nel convertire il processo cognitivo dell’uomo in algoritmi per la realizzazione di specifiche operazioni, allo scopo di rendere il lavoro più efficiente, meno faticoso e più sicuro».
Foto di apertura: il robot HyQReal, sviluppato dal’Istituto Italiano di Tecnologia in collaborazione con Inail e Moog. Sarà la base del robot potatore sviluppato dal laboratorio piacentino dell’Università Cattolica